Collaborative Winding: Robotic Collaboration (2020)
Collabrative Winding is a robotic research/ fabrication project that proposes a system that utilizes robotic weaving based on an object. This project was a collaboration with Nick Coppula.
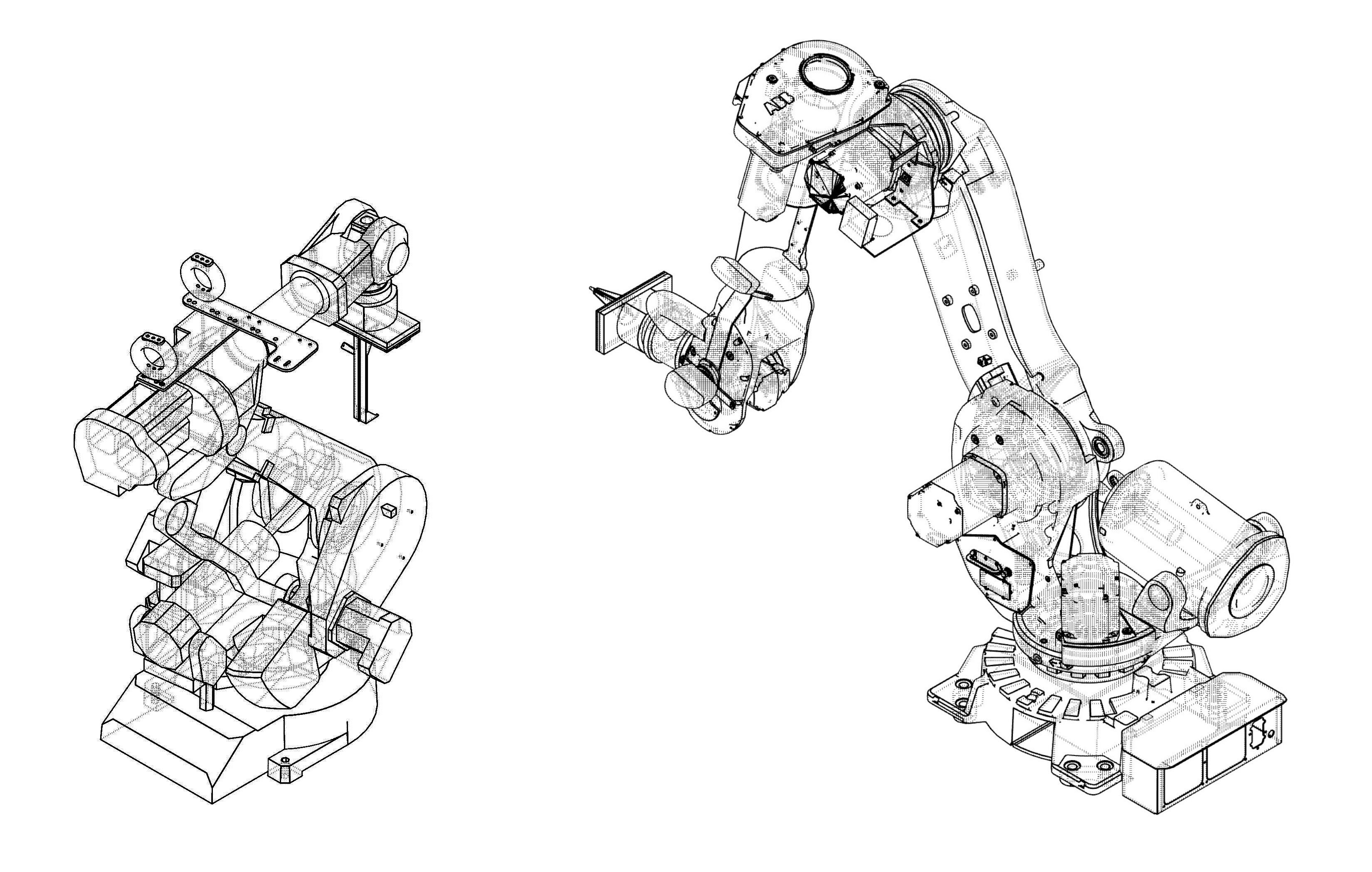
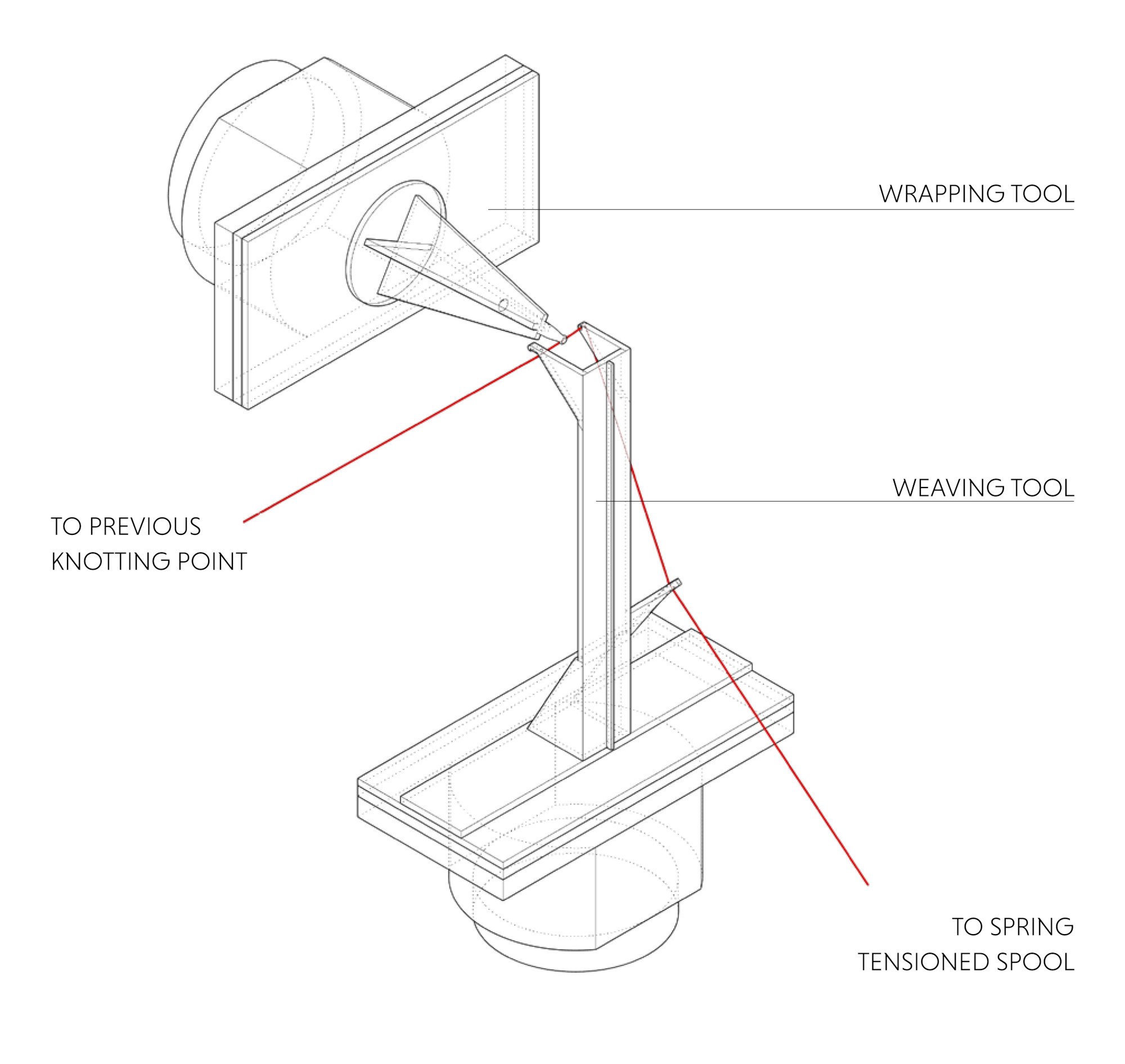
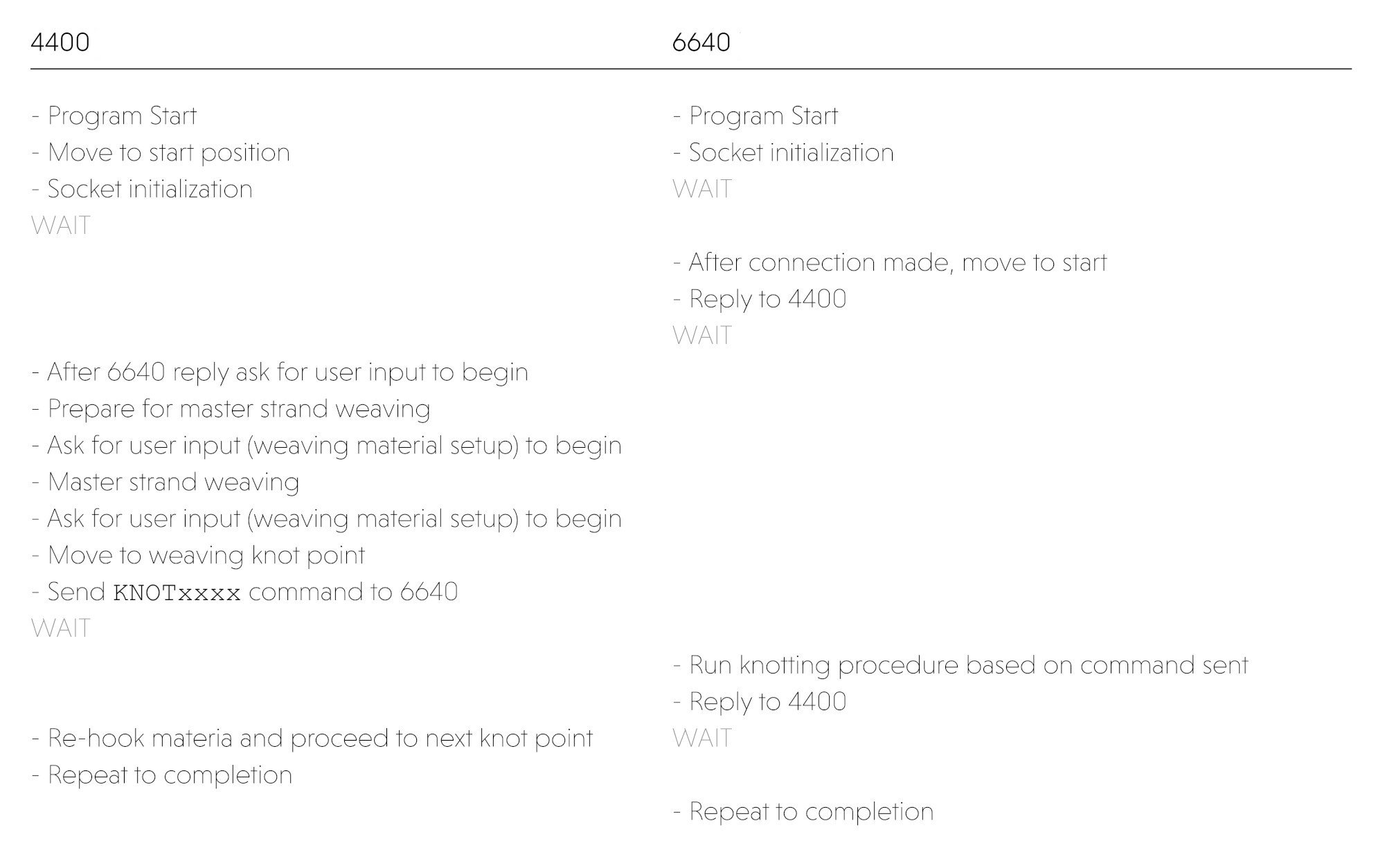
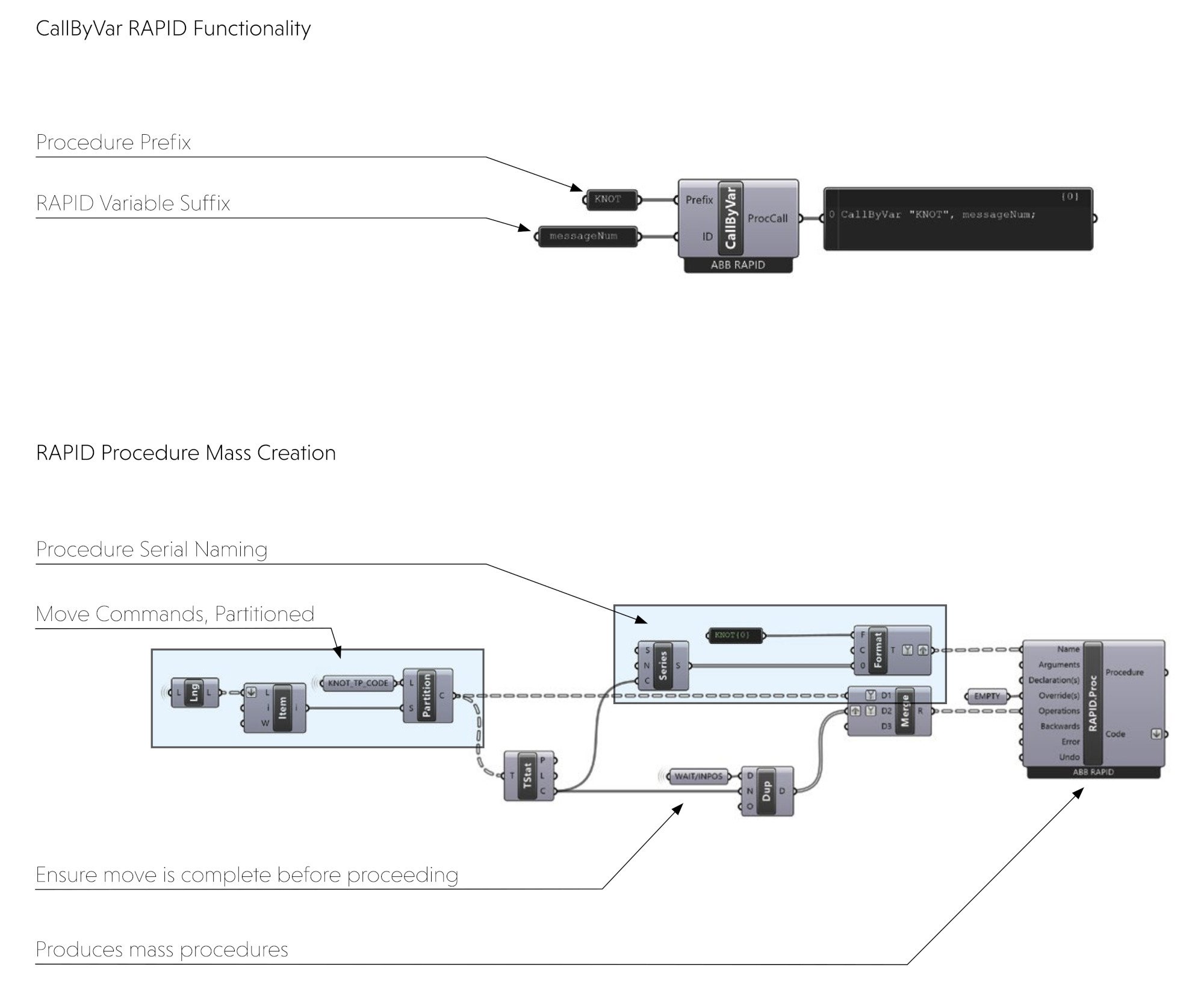
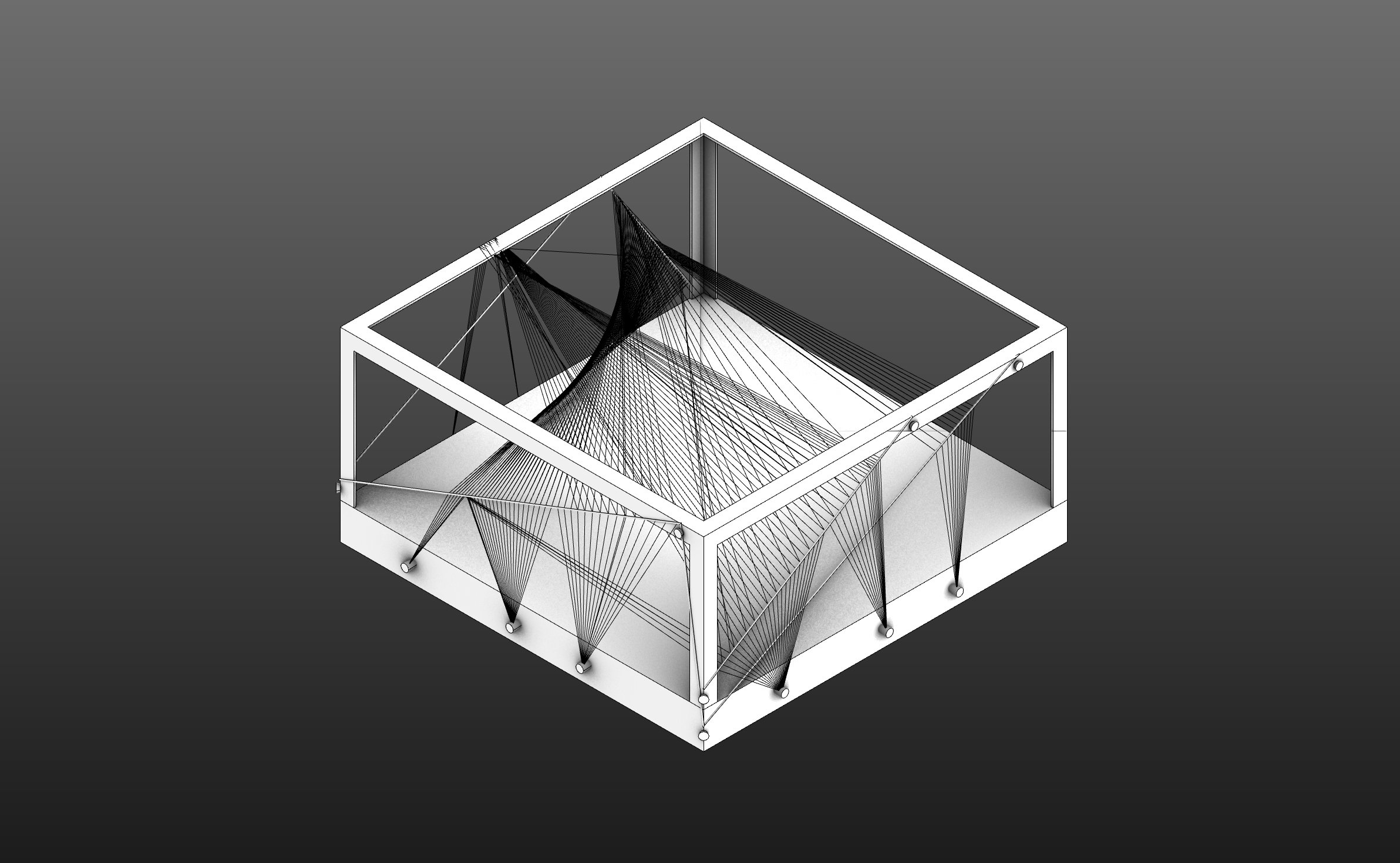
This process required collaboration between two robots and was written in RAPID and HAL for grasshopper. The ABB 4400 robot moves the material to a position inside the frame and the ABB 6640 robot loops the material onto a fastening system on the exterior of the frame. This robotic collaboration enables the internal complexity of weaving while maintaining a regular external frame geometry, which is then expressed by repeatedly bringing numerous strands back to a set of fixed positions.
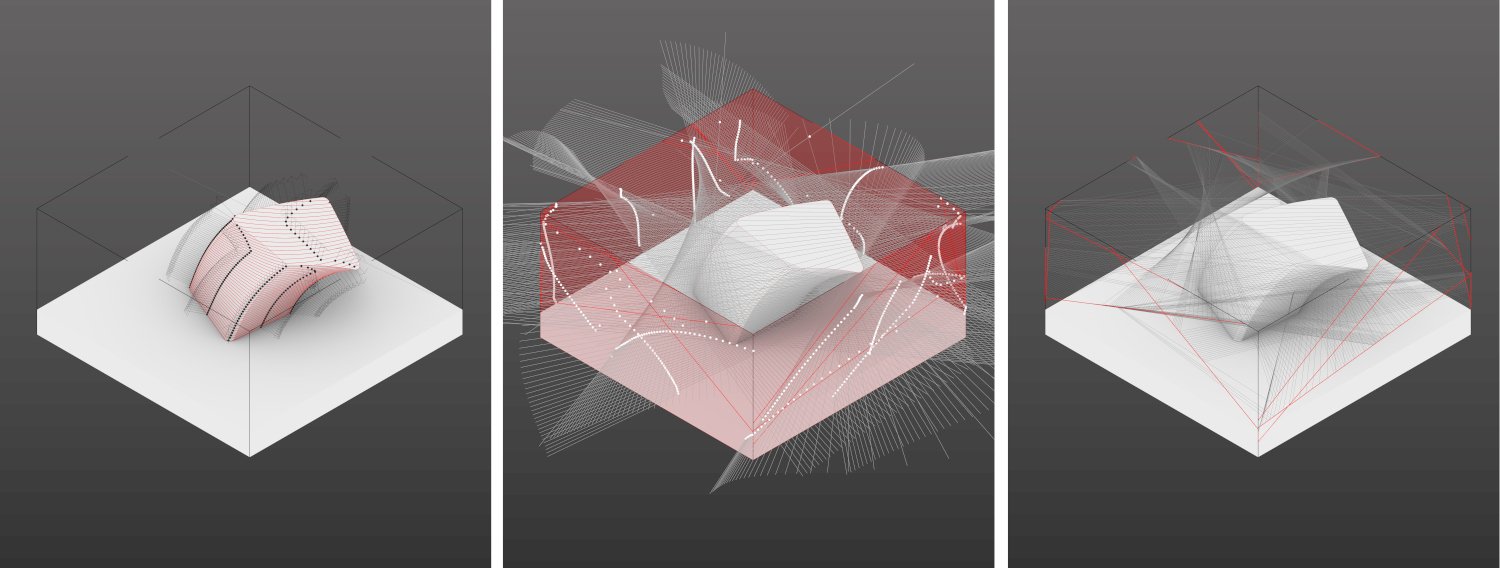
The project's form has a complex, spatial interior rather than a regulated exterior. This makes it distinct from many precedent projects which heavily rely on robotically woven structures aptly described as “shells”. The collaborators proposed a system of weaving that is adaptable and builds upon the existing formal language surrounding robotically woven structures. Inverted weaving was the development of an inside-out approach to weaving where the basic frame becomes external and the complexity becomes internal.
- 2025
- Primitive Slicer
- 2024
- Semantic Floor Plans
- ITECH Research Pavilion
- Wax Flamingos
- Phenomena Modeling
- 2023
- Honeycomb
- Water-QWOP
- Horse & Chariot
- Hyper-hydration
- 2022
- Sprawl & Resilience
- 2021
- Cybernetic Field
- Bubble-GAN
- 2020
- ELC: Carrick
- 15-112: placeHolder
- Collaborative Winding
- 2019
- Flood Museum
- Design Fabrication
- Spring Garden Hostel
- Modular Garden
- Bathhouse
- 2018
- Hoophouse
- Drawings