Water Sports: Hyper Hydration (2023)
Water Sports: Hyper Hydration is an topology optimization experiment. It places a tubular geometry, representing a water bottle at the center of the inquiry. It examines single objective optimization for the 3D profile that empties itself the fastest. This project was developed as part of the Computational Explorations seminar at ITECH master's program in collaboration with Chris Kang, Markus Renner, and Cornelius Carl. The code and studies for this project can be found on GitHub.
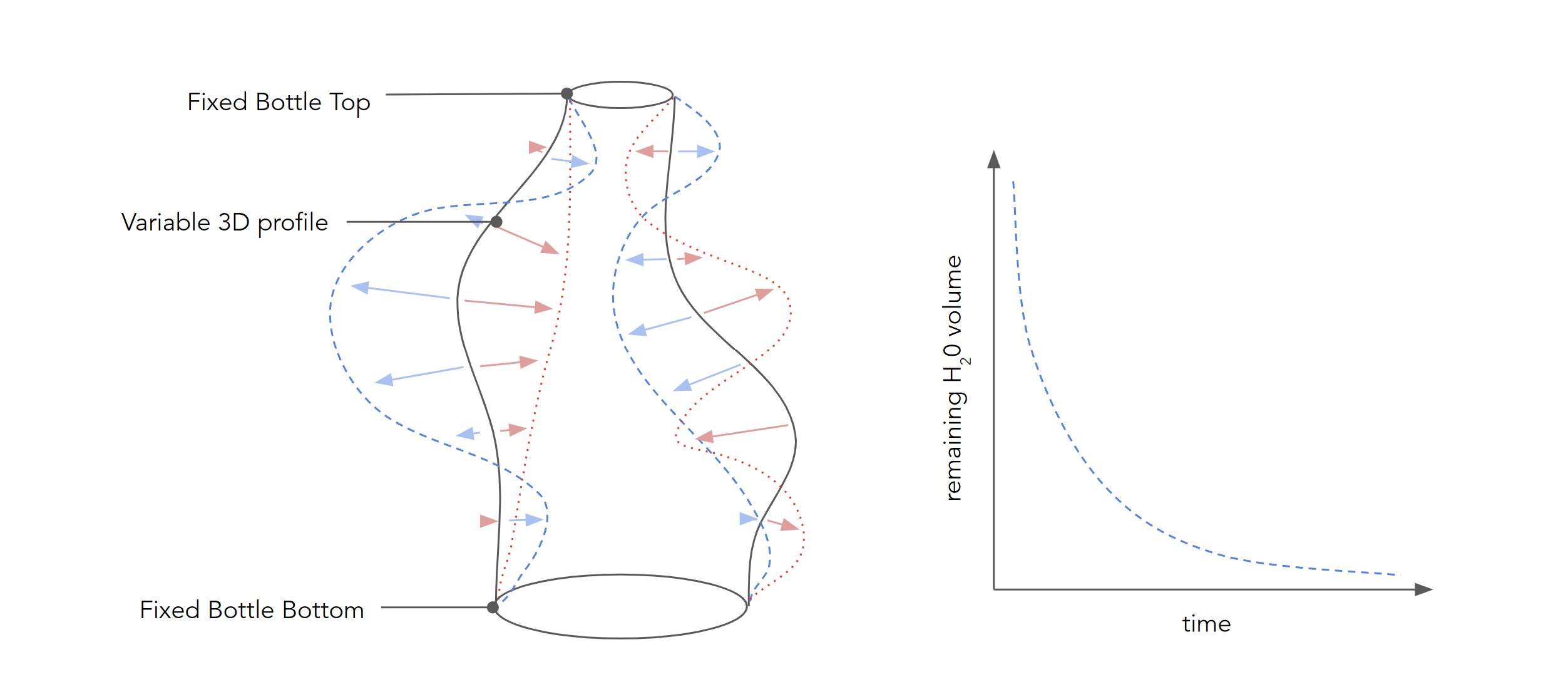
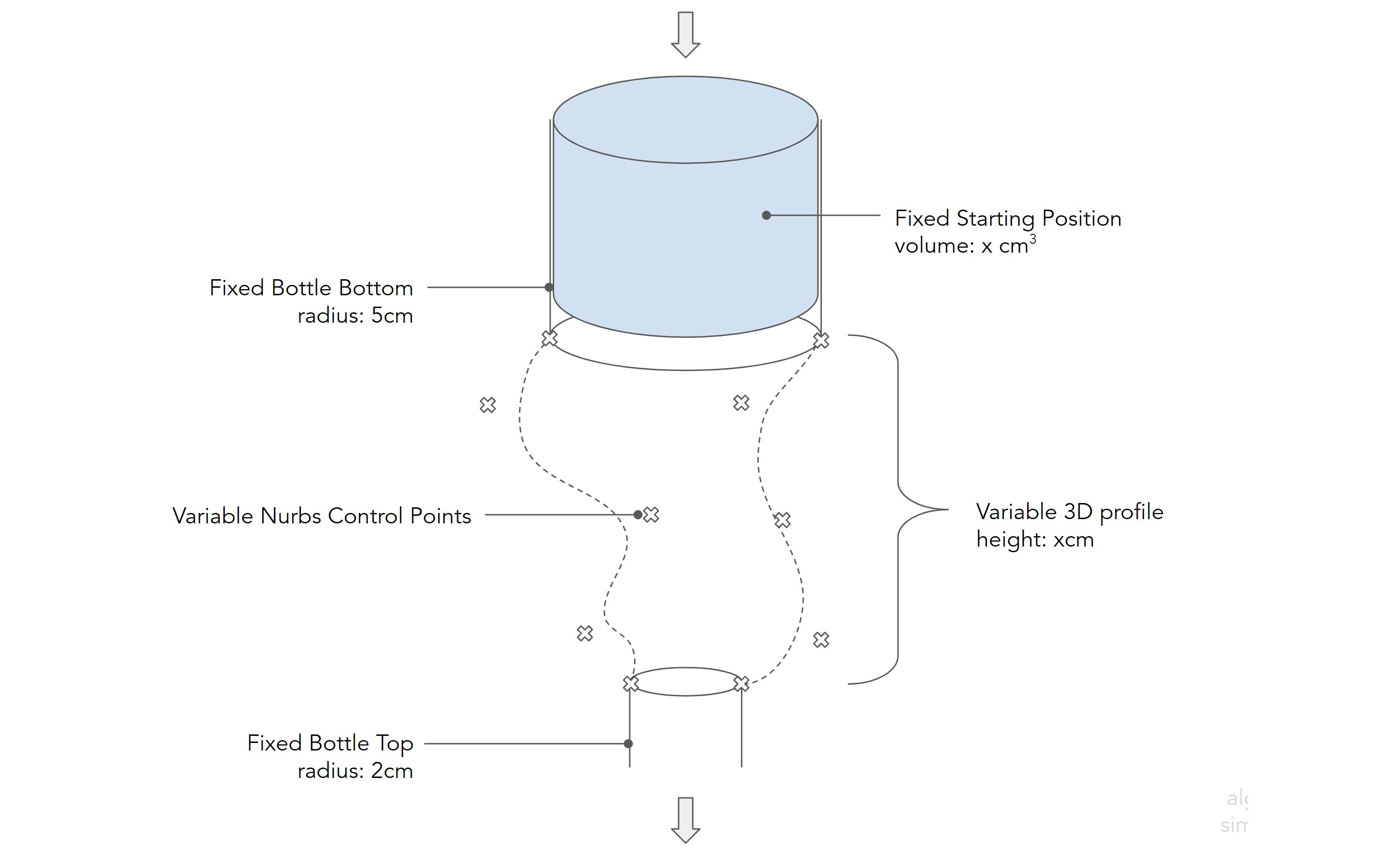
The project's initial phase involved implementing various algorithms encompassing single-objective optimization techniques to efficiently optimize the shape of a water bottle. The project aimed to develop a water bottle model with fixed top and bottom sizes while allowing for a variable profile along the entire circumference. The primary objective was identifying optimal parameters for efficient water release, minimizing the time required for water to exit.
The single-objective optimization focused on maximizing water expulsion speed from the bottle.
The workflow utilized a Python library to generate NURBS surfaces exported as STL files. These were processed by a Blender script to combine static bodies representing the cap and water storage. An alternative Python library was later used to address seam issues. Post mesh generation, FluidX3d, a modified CFD simulation, used STL files as input. Adjustments were made to the simulation's source code using C++ for dynamic data exchange. A Python script managed the process, leveraging algorithms to trigger simulation runs.
 |  |
 |  |
The bottle's design utilized 5 circles with 6 control points each, totaling 30 parameters. Control points allowed flexible shape creation along a line between the central point and a radius of 1. Static bodies were consistently incorporated at both ends of the bottle, serving distinct purposes. The first housed water storage, while the final acted as the cap for controlled water release.
Convergence & Robustness
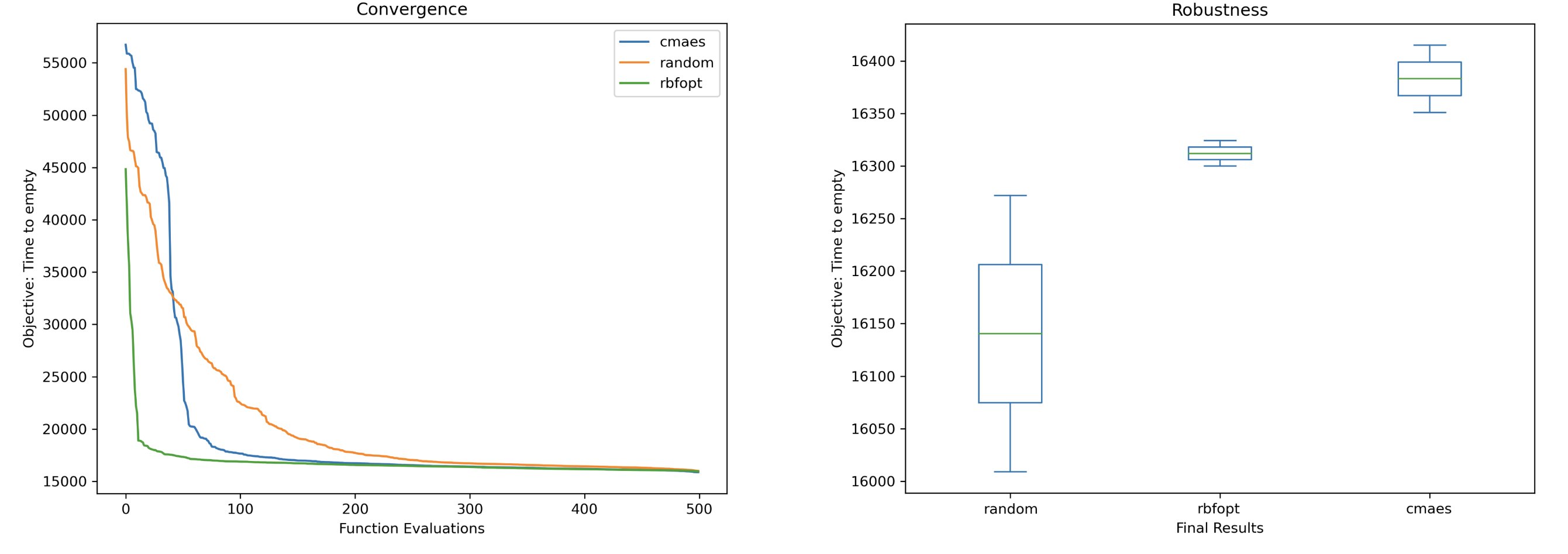
Observations from single-objective optimization were inconclusive regarding curvature patterns. Throughout experimentation, the RBFopt algorithm outperformed others in speed and robustness, demonstrating advantages in optimization efficiency. Optimized single-objective designs aimed to enhance drainage efficiency through vortex creation, achieving an 11% improvement compared to a simple cylinder. Further analysis was needed to understand these improvements.
Results (in simulation steps) | |
 |  |
| No Optimization: 17,396 | RBFOpt: 15,849 |
Results (in simulation steps)
No Optimization: 17,396
RBFOpt: 15,849
- 2025
- Primitive Slicer
- 2024
- Semantic Floor Plans
- ITECH Research Pavilion
- Wax Flamingos
- Phenomena Modeling
- 2023
- Honeycomb
- Water-QWOP
- Horse & Chariot
- Hyper-hydration
- 2022
- Sprawl & Resilience
- 2021
- Cybernetic Field
- Bubble-GAN
- 2020
- ELC: Carrick
- 15-112: placeHolder
- Collaborative Winding
- 2019
- Flood Museum
- Design Fabrication
- Spring Garden Hostel
- Modular Garden
- Bathhouse
- 2018
- Hoophouse
- Drawings